
ศรีนคร นนทนาคร
Azbil (Thailand) Co., Ltd

การเปลี่ยนยุค (Renovation) ของสัญญาณทางเครื่องมือวัดในอุตสาหกรรมจากการใช้ลม (Pneumatic 3-15 psi) มาสู่การใช้สัญญาณไฟฟ้า (Electrical 4-20 mA) ดังเช่นที่เป็นอยู่ทุกวันนี้นั้น กำลังเกิดคลื่นการเปลี่ยนแปลงอีกครั้ง โดยมีการพัฒนาระบบการสื่อสารที่ใช้อยู่กับอุปกรณ์วัดชนิดต่าง ๆ ที่เรียกว่า สมาร์ต (Smart) ให้สามารถติดต่อสื่อสารระหว่างกันและกันได้มากกว่าที่จะเป็นแค่เพียงตัวเซ็ตค่า (Configuration Tools) จาก แฮนเฮลด์ (Handheld) ที่รู้จักกันในชื่อ HART Communication เท่านั้น
เทคโนโลยี HART Communication พัฒนามาจากระบบ Bell 202 ที่เป็นระบบโทรศัพท์ในประเทศอเมริกา ตั้งแต่ ปี 1989 ถึงแม้จะไม่ใช่สมาร์ตระบบแรก แต่เป็นระบบที่เปิดกว้างให้กับผู้ผลิตต่าง ๆ ได้เข้ามาใช้ได้ทำให้ได้รับความนิยมมาก ในปี 1990 ได้เกิดการรวมตัวประชุมกันเป็นครั้งแรกในเดือนสิงหาคม และนำมาสู่การจัดตั้งสมาคม HART Communication Foundation ในเดือนมิถุนายน ปี 1993 ซึ่งเป็นสมาคมที่ไม่แสวงหาผลกำไร (NOP-Non Profit Organization) มีสมาชิกเริ่มต้นที่ 35 สมาชิกในเวลานั้น และได้มีการพัฒนาเทคโนโลยีเรื่อยมา จนปี 2015 ได้ควบรวมกิจการกับสมาคม Fieldbus Foundation และใช้ชื่อใหม่ว่า สมาคมฟิลด์คอมกรุ๊ป (FieldComm Group) เรียกย่อ ๆ ว่า FCG ในประเทศไทย สมาคมฟิลด์บัสไทย ได้เปลี่ยนชื่อเป็น ฟิลด์คอมกรุ๊ปไทย (FieldComm Group Thai Association) และเปิดให้สมาชิก HART เข้าร่วมกิจกรรมในปี 2015 นี้เป็นต้นมา

รูปที่ 1 การเปลี่ยนแปลงของทั้งสองสมาคมคือ HART Communication Foundation และ Fieldbus Foundation
เรียกได้ว่าการรวมครั้งนี้เป็นการสร้างบ้านให้ ดิจิตอลเทคโนโลยีทั้งสองได้ร่วมกันพัฒนาเพื่อระบบอัตโนมัติในอนาคตต่อไป และมีการนำคำว่า Group แทน คำว่า Foundation แต่ทว่าโลโก้ของเทคโนโลยีทั้งสอง ยังคงใช้ต่อไปไม่เปลี่ยนแปลง มีเพียงชื่อและโลโกของสมาคมที่เปลี่ยนไป เสมือนหนึ่งว่าเกิดเป็นบ้านหลังใหม่ที่ชื่อฟิลด์คอมกรุ๊ปขึ้น เพื่อให้ทั้งสองเทคโนโลยีได้ใช้เพื่อพัฒนาต่อไป

รูปที่ 2 แสดงโครงสร้างบ้าน ของทั้งสองเทคโนโลยีที่อยู่ภายใต้บ้านใหม่ที่ชื่อว่า FieldComm Group
ในที่นี้เราจะมาดูกันว่าเทคโนโลยีที่ชื่อ HART Communication นี้เป็นอย่างไรบ้าง
HART มาจากคำเต็มว่า Highway Addressable Remote Transducer คือการสร้าง ทางด่วน (Highway) เพื่อการสื่อสารกับตัวอุปกรณ์ (Transducer) แบบที่ติดต่อจากที่ใดก็ได้ (Remote) พร้อมกับมีการตั้งชื่อหรือกำหนดตำแหน่ง (Address) ได้
การสื่อสาร HART นั้นจัดเป็นการสื่อสารแบบ Digital ที่มี Analog 4-20 mA เป็นสื่อ คือยังคงใช้ สัญญาณไฟฟ้ากระแสตรง 4-20 mA ในการวัดและควบคุมหรือติดต่อกัน ระหว่างตัวอุปกรณ์ เช่น ทรานสมิตเตอร์ วัดค่าทางกายภาพ แล้วแปลงเป็นสัญญาณ PV (Process Variable) ส่งสัญญาณ Analog ที่วัดได้นี้ให้ระบบควบคุม DCS (Distributed Control System) หรือ PLC (Programmable Logic Control) หรือส่งสัญญาณ Analog จาก DCS หรือ PLC ที่ประมวลผลแล้วเป็นสัญญาณ MV (Multivariable Value Output) ให้กับ Positioner ที่อยู่ที่ตัว Control Valve สัญญาณ Digital ที่สื่อสารนั้นมีหลายค่า และมีจำนวนมาก โดยใช้ ความถี่เช่นเดียวกับการสื่อสารทางไกล (Telecomunication) จาก FSK (Frequency Shift Keying) Modems ตามรูปที่ 3
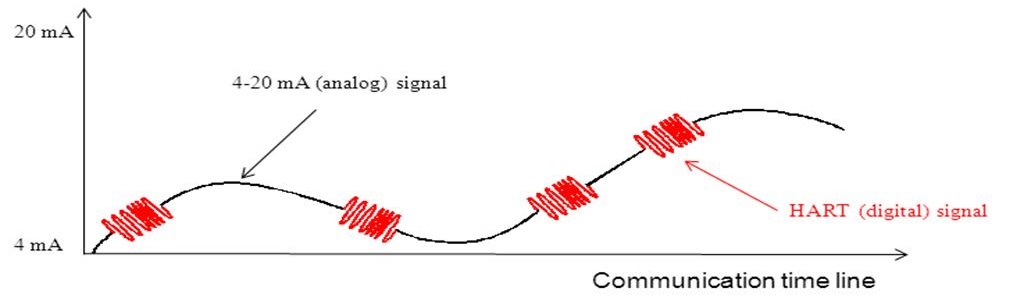
รูปที่ 3 แสดงสัญญาณ Digital ของ HART และ สัญญาณ Analog 4- 20 mA DC Modulate กัน
สัญญาณ HART ใช้ ความถี่ 2 ค่า แทนสถานะของ โลจิก 0 และ 1 คือ ความถี่ 1,200 Hz แทนโลจิก 1 และความถี่ 2,200 Hz แทนโลจิก 0 โดยทั้ง 2 สัญญาณ จะขี่ อยู่บนสัญญาณ Analog ดังรูปที่ 3 โดยสัญญาณ ความถี่นี้จะมีค่าแรงดัน (Voltage) อยู่ที่ +/- 0.6 Volt สัญญาณความถี่ทั้ง 2 ความถี่จะสมมาตรกันระหว่างช่วงบวก (+) และช่วงลบ (-) ในแต่ละช่วงเวลา ทำให้ไม่เกิดการรบกวนกับสัญญาณ Analog 4–20 mA DC
สัญญาณ HART เป็นการสื่อสารแบบ 2 ทาง (2 Way Communication) ระหว่าง ตัวอุปกรณ์ (Device) และ ตัว Host คือสามารถติดต่อไปมาได้ระหว่าง Device และ Host ซึ่ง Host ในที่นี้อาจเป็นเครื่องมือ Handheld หรือ DCS หรือ PLC ก็ได้ ดังรูปที่ 4



รูปที่ 4 แสดงตัว Handheld ซึ่งในที่นี้คือ Host ตัวหนึ่งเหมือนกัน และเป็นที่คุ้นเคยกันมาแต่เดิม
สัญญาณ HART นี้ ติดต่อกันด้วยระบบ Master–Slave Protocol คือมีตัวที่ทำหน้าที่ เป็น Master ในที่นี้คือ Host นั่นเอง และมี Slave ในที่นี้คือ Devices ต่าง ๆ ด้วยแต่เดิมมา ในระบบ HART Network จะมี Host ได้แค่ตัวเดียว คือถ้าตัวอุปกรณ์เชื่อมต่อสัญญาณ HART กับ Host System แล้วก็ไม่สามารถติดต่อกับ Handdeld ได้ ดังรูปที่ 5 แต่ว่าอุปกรณ์ HART รุ่นใหม่ ๆ (Rev 5 เป็นต้นมา) สามารถรองรับการมี Host ได้สูงสุด 2 Host ประโยชน์ของการรองรับ 2 Host คือ DCS หรือ PLC ก็สามารถติดต่อสื่อสารกับ อุปกรณ์ได้ แล้วก็สามารถใช้ Handheld ติดต่อในเวลาเดียวกันได้ โดยตั้งให้ DCS หรือ PLC เป็น Primary Host และ Handheld เป็น Secondary Host

รูปที่ 5 Handheld HART ไม่สามารถเชื่อมต่อกับอุปกรณ์ HART Rev 4 ได้ เพราะ Host เชื่อมต่ออยู่แล้ว
ระบบของ HART จะติดต่อสื่อสารผ่านระบบ Master-Slave คือ ตัวอุปกรณ์จะคุยได้ก็ต่อเมื่อ Host คุยมาก่อน เราเรียกการคุยของ Host ว่า Request และการคุยของอุปกรณ์ว่า Response ด้วยเหตุนี้เราจึงเรียกการสื่อสารแบบนี้ว่า Request Response Mode ซึ่งเป็นการสื่อสารปกติที่ใช้งานอยู่ทั่ว ๆ ไปดังรูปที่ 6 บน ใน Mode นี้จะส่งสัญญาณ ได้ คำสั่ง (Command) ละ 1 วินาที และใน 1 Command จะมีประมาณ 2-3 ข้อมูล ดังรูปที่ 6 ล่าง หากมี 2 Host Primary Host จะเป็นผู้ส่ง Request Mode ใน 1 วินาทีสามารถ รับส่งได้ 1,200 Bit


รูปที่ 6 แสดง Request Response Mode ระหว่าง Host และ Device ตามช่วงเวลา
ระบบ HART ยังมีอีก Mode ให้เลือกใช้ เรียกว่า Brust Mode เป็น Mode ที่ให้ตัวอุปกรณ์สามารถส่งข้อมูลได้เร็วขึ้น และต่อเนื่องโดยไม่ต้องรอ Request จาก Host ก่อนตามรูปที่ 7 Host จะเพียง Acknowledge เมื่อได้รับข้อมูลจากตัวอุปกรณ์ ทำให้ส่งข้อมูลได้มากกว่าโหมด Request-Response คือ 2-3 Command ต่อ 1 วินาที มักใช้กับระบบที่ต้องการ Diagnostic หรือข้อมูลจากตัวอุปกรณ์จำนวนมากและต่อเนื่อง


รูปที่ 7 แสดง Brust Mode ระหว่าง Host และ Device ตามช่วงเวลา
เพื่อให้เห็นภาพสัญญาณ HART ได้ชัดเจนขึ้น ขอให้ดูที่ Oscilloscope ตามรูปที่ 8 จะเห็นลักษณะของ Command จาก Host และ Response จากตัวอุปกรณ์

รูปที่ 8 แสดงลักษณะ สัญญาณ HART จาก Oscilloscope ใน Mode Request Response
การติดต่อสื่อสารระหว่างสัญญาณ Analog และ Digital–HART ในระบบเครื่องมือวัดระหว่าง ตัวอุปกรณ์ และ Host System นั้นจะแยกจากกัน ตามรูปที่ 9 โดยจะแตกต่างกันระหว่าง Host คุยกับ Positioner และ Host คุยกับ Device
กรณีที่ Host คุยกับ Positioner สัญญาณ Analog 4-20 mA หลังจากแปลงจาก Digital ที่ Host-DCS/PLC ด้วย D/A แล้ว จะ Modulate กับ สัญญาณ HART Request ที่อยู่ในรูปความถี่ แล้วไปยังตัว Positioner โดยสัญญาณ Analog 4-20 mA จะถูกแปลงเป็น Digital ด้วย A/D ส่วนสัญญาณ HART Request จะผ่าน LPF (Low Pass Filter) กรองความถี่แล้วแปลงป็น Digital ให้ Microprocessor ของตัว Device หลังจากนั้น สัญญาณ HART Response จากตัว Positioner จะส่งไปหา Host-DCS/PLC และถูกแปลงผ่าน LPF (Low Pass Filter) เช่นกัน ซึ่งจะเลือกเฉพาะความถี่ 1,200 และ 2,200 Hz เท่านั้น ส่วนความถี่ที่มาจากสัญญาณอื่น เสมือนเป็น Noise จะถูกจำกัดด้วย LPF นั่นเอง ตามรูปที่ 9a

รูปที่ 9a แสดงการส่งสัญญาณ ระหว่าง Host DCS/PLC กับ Device ที่เป็น Positioner
ในกรณีที่ Host คุยกับ Transmitter สัญญาณ Analog 4-20 mA หลังจากแปลงจาก Digital ที่ Device-Transmitter ด้วย D/A แล้ว จะ Modulate กับ สัญญาณ HART Response ที่อยู่ในรูปความถี่ แล้วไปยัง Host-DCS/PLC โดยสัญญาณ Analog 4-20 mA จะถูกแปลงเป็น Digital ด้วย A/D ส่วนสัญญาณ HART Response จะผ่าน LPF (Low Pass Filter) กรองความถี่แล้วแปลงป็น Digital ให้ Microprocessor ของตัว Host-DCS/PLC ซึ่งจะเลือกเฉพาะความถี่ 1,200 และ 2,200 Hz เท่านั้น ส่วนความถี่ที่มาจากสัญญาณอื่น เสมือนเป็น Noise จะถูกจำกัดด้วย LPF นั่นเองตามรูปที่ 9b

รูปที่ 9b แสดงการส่งสัญญาณ ระหว่าง Host DCS/PLC กับ Device ที่เป็น Transmitter
จากรูปที่ 9 ทั้งสองรูป จะเห็นว่า สัญญาณ HART และสัญญาณ Analog ที่ Modulate กันในสายสัญญาณ (Cable) อยู่นั้น จะแยกกันโดยสิ้นเชิง และเป็นอิสระต่อกัน ที่ Host และตัว Devices (Positioner หรือ Transmitter) และยังอธิบายได้ว่า สัญญาณ Digital HART สามารถใช้กับระบบ Analog 4-20 mA DC ได้ อีกทั้ง เทคโนโลยีการสื่อสารด้วย HART นั้น เป็นระบบที่เปิดให้มีการผลิตได้ ทำให้มีผู้ผลิต Protocol นี้จำนวนมาก ไม่ว่าจะเป็นผู้ผลิต Host หรือผู้ผลิต Transmitter หรือผู้ผลิต Valve Positioner ทำให้ไม่ต้องกังวลกับความหลากหลายหรือยุ่งยากของการเตรียม Handheld ใช้งานที่หลากหลายยี่ห้อดังรูปที่ 10

รูปที่ 10 แสดงความยุ่งยากของการเตรียม Handheld เพื่อนำไปใช้ที่หน้างาน ด้วยยี่ห้อ และชนิดของอุปกรณ์
Universal Commands, Common Practice Commands และ Device Specific Commands ตามรูปที่ 11 ให้ดูแต่ละชนิดของ Commands ว่ามีอะไรบ้าง โดย HART Commands นี้จะมี 38 Bit ของ Address ประกอบด้วย ผู้ผลิต ID, ชนิดของอุปกรณ์ และข้อมูลอื่น ๆ ซึ่ง HART Master จะรู้เพื่อให้การสื่อสารเป็นไปด้วยดี

ตารางที่ 1 แสดง Commands ทั้ง 3 ชนิด
HART ได้พัฒนารูปแบบภาษา ในรูปแบบอิเล็กทรอนิกส์ (EDDL- Electronics Device Description Language) อย่างมีมาตรฐานเป็นสากล ตาม IEC 61804-2 ภาษาที่ใช้คือ ภาษา C นั่นเอง โดยมีสมาคม HART เป็นผู้บริหาร การขึ้นทะเบียนและควบคุม การใช้ภาษาให้เป็นไปอย่างมีประสิทธิภาพ และไม่เกิดปัญหาโดยเฉพาะผู้ผลิต Host และผู้ผลิต Device รายต่าง ๆ ดังเช่นรูปที่ 11

รูปที่ 11 แสดงตัวอย่างการสื่อสารระหว่าง Device Transmitter กับ Host system
DD File ในรูปอิเล็กทรอนิกส์ หรือที่เรียกกันว่า EDD File จะสามารถดาวน์โหลดได้จากเว็บไซต์ของผู้ผลิตต่าง ๆ แต่ละราย และสามารถดาวน์โหลดจากเว็บไซต์ของ FieldComm Group ได้ แต่ไม่ควรใช้วิธี Copy File ให้กันเพื่อเป็นการรักษาความปลอดภัย จากตารางของรูปที่ 13 จะเห็นว่าผู้ผลิตแต่ละรายจะมี Code ต่างกัน เช่น Azbil มี Code 0x000036 ABB มี Code 0x000012 เป็นต้น และ Device Code ของอุปกรณ์แต่ละตัวตามแต่ผู้ผลิต รวมถึง Dev-Rev และ DD-Rev ที่มีการกำกับดูแลการจดทะเบียนและควบคุมโดย FieldComm Group ในบางอุปกรณ์ อาจมีหลาย Revision ต้องใช้ความระมัดระวังในการเลือกดาวน์โหลดให้ได้ DD File ที่ตรงกับอุปกรณ์ เช่นนั้นแล้วจะมีปัญหากับการสื่อสาร ระหว่าง Devices กับ Host

ตารางที่ 2 แสดงตัวอย่าง ตาราง DD File Library ของผู้ผลิตต่าง ๆ (www.fieldcommgroup.com)
โดยทั่วไปแล้วสามารถใช้สายเช่นเดียวกับ สายสัญญาณ Analog 4-20 mA dc แต่ว่าเพื่อเป็นการป้องกันสัญญาณรบกวน (Noise) จากสัญญาณความถี่อื่น ๆ ที่อาจรบกวนได้จึงควรใช้สายที่มี Shield หุ้มแต่ละเส้น โดยสายขนาด AWG 18 สามารถใช้ได้ไกลถึงเกือบ 3 กิโลเมตร แต่สิ่งที่เป็นตัวกำหนดสำคัญสุดในเรื่องระยะทางคือค่าความจุ (Capacitace) และจำนวนของ Device ในสายคู่นั้นตามตารางในตารางที่ 3 ที่สายขนาด AWG18 ในขณะเดียวกัน ค่าความต้านทานก็สำคัญเช่นกัน คือต้องไม่น้อยกว่า 230 โอห์ม ดังตารางที่ 3 และสามารถเชื่อมต่อกับ Secondary Host ได้แค่ 1 Host เท่านั้น คือทั้งระบบจะมี Host ได้แค่ 2 Host เท่านั้น และแน่นอนว่าสามารถใช้ร่วมกับ analog device ได้ดังรูปที่ 12 ในด้านความต้านทานสูงสุด (Load) ที่รับได้นั้นจะขึ้นอยู่กับ ความสามารถของตัว Device เอง สามารถดูได้จาก Specification Sheet และ Power Supply ที่ยิ่งสูงยิ่งรองรับโหลดได้สูงด้วย

ตารางที่ 3 แสดงตารางสายเคเบิล ขนาด AWG 18 กับจำนวนตัว devices และค่าความจุไฟฟ้า (Capacitance)

รูปที่ 12 แสดงการต่อ Host ทั้ง Primary Host, Secondary Host และ Device HART ในการใช้งานจริง
การ Calibrate HART Device สามารถทำได้ 2 จุดด้วยกันตามรูปที่ 13 คือ ทำที่ Transducer และทำที่ Analog Electronics Board ซึ่งต่างจาก Device ธรรมดา ที่ทำได้แค่จุดเดียวคือ ที่ Electronics Board โดยการปรับ Zero/Span เท่านั้น ตามรูปที่ 13a แต่ HART Device สามารถปรับที่ Transducer หรือส่วน Sensing และที่ Analog Channel (Electronics Board) ปรับ Zero, Gain, Range Value (Span) ตามรูปที่ 13b

รูปที่ 13a แสดง Block Diagram ของ Device แบบธรรมดา

รูปที่ 13b แสดง Block Diagram ของ HART Device
หากว่าความสัมพันธ์ระหว่าง Input และ Output ไม่ Linear จะเป็นเรื่องที่ยากมากสำหรับ Device แบบธรรมดา แต่ด้วยการมี Microprocessor ทำให้สามารถคำนวณได้ ไม่ว่าจะในรูปของ Linear หรือ Non-linear อย่าง Square Root, Exponential หลังจากผ่าน Transducer Block แล้วจะแปลงเป็นสัญญาณ Digital Input (PV) เมื่อเราใช้ Handheld เราจะอ่านค่านี้ได้ ที่เป็นส่วนแปลงค่า (Convert) ที่มี Transfer Function อยู่ภายใน จึงปรับ Value Span และ Function ที่ ส่วน Convert นี้ได้ด้วย และปรับ Gain/Zero ที่ Analog Channel ได้อีกเช่นกัน ที่ Transducer จะมี Commands ที่ให้ปรับได้ หรือคุ้นเคยกันในชื่อ Sensor Trim
HART Devices นอกจากจะทำหน้าที่ เช่นเดียวกับ Device อื่น ๆ ทั่วไปแล้วแล้วยังมีความสามารถในการสื่อสารแบบดิจิตอล ที่เป็นมาตรฐานสากล (IEC) และได้รับความนิยมอย่างแพร่หลายของภาคอุตสาหกรรมในปัจจุบันนี้ และมีอุปกรณ์ HART ติดตั้งอยู่ทั่วโลกไม่น้อยกว่า 40 ล้านตัว จึงเป็นการเริ่มต้นเข้าสู่ยุคดิจิตอล ด้วยการวัดและควบคุมด้วยสัญญาณ อะนาลอก แต่วิเคราะห์หาสาเหตุ (Diagnostic) ด้วยดิจิตอล ก่อนที่จะเป็นวัดและควบคุมด้วยดิจิตอลและวิเคราะห์หาสาเหตุ (Diagnostic) ด้วยดิจิตอลในยุคของ Industry 4.0 ที่กำลังมาถึง


รูปงานสัมมนาและจัดแสดงเทคโนโลยีของ FCG (Thai) Association ที่จัดที่เมืองพัทยา ขณะ Vice President ของ FCG Asia Pacific ชื่อ Mr.Sasajima บรรยายเปิดการสัมมนาและอัปเดตข่าวสารด้านเทคโนโลยี เมื่อเดือนพฤศจิกายน 2558 ที่ผ่านมา


นอกจากการสัมมนาจากผู้ผลิตต่าง ๆ แล้ว ยังมีการจัดนิทรรศการ จากผู้ผลิตและสถาบันที่เกี่ยวข้องมากกว่า 10 รายอีกด้วย ทั้งในประเทศไทยและจากต่างประเทศ เพื่อร่วมกันเผยแผ่ดิจิตอลเทคโนโลยี ผ่านบ้านหลังใหญ่หลังนี้ที่ชื่อ FieldComm Group (FCG)
ข้อมูลอ้างอิง
• HART Communication Application Guide Rev 7.3, 2014
• Calibration HART Transmitters Rev 1.1, 2008
• Azbil HART devices Training Material, 2015
สงวนลิขสิทธิ์ ตามพระราชบัญญัติลิขสิทธิ์ พ.ศ. 2539 www.thailandindustry.com
Copyright (C) 2009 www.thailandindustry.com All rights reserved.
ขอสงวนสิทธิ์ ข้อมูล เนื้อหา บทความ และรูปภาพ (ในส่วนที่ทำขึ้นเอง) ทั้งหมดที่ปรากฎอยู่ในเว็บไซต์ www.thailandindustry.com ห้ามมิให้บุคคลใด คัดลอก หรือ ทำสำเนา หรือ ดัดแปลง ข้อความหรือบทความใดๆ ของเว็บไซต์ หากผู้ใดละเมิด ไม่ว่าการลอกเลียน หรือนำส่วนหนึ่งส่วนใดของบทความนี้ไปใช้ ดัดแปลง โดยไม่ได้รับอนุญาตเป็นลายลักษณ์อักษร จะถูกดำเนินคดี ตามที่กฏหมายบัญญัติไว้สูงสุด




